Test of the "Background subtraction library".
Description: Background subtration algorithm to detect moving regions. There is a post-processing stage to filter the noise in the computed moving regions.
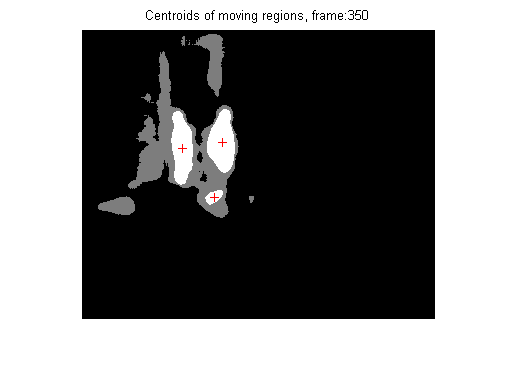
Input: a sequence of images. Output: a trinary image that shows background (black areas), moving regions (white areas) and shadows (grey areas). In addition, the centroid of each is moving region is displayed.
External code: * Background subtraction library of Zoran Zivkovic.
Author: Carlos Roberto del Blanco Adán,
Grupo de Tratamiento de Imágenes, GTI SSR, Madrid
cda@gti.ssr.upm.es
Date: 03/12/2010
Version 1.0
Contents
- Library paths
- Input
- Initialization.
- Read frame
- Background Subtraction.
- Noise supression.
- Object properties: centroids and region coordinates.
- Filtering objects by size.
- Results: Show an image without moving objects.
- Results: Show an image with moving objects.
- Results: Show moving regions.
- Results: Show moving regions after noise filtering.
- Results: plot object centroids.
- Ending
- Note 1
clear all; close all; clc;
Library paths
addpath(genpath('./lib'));
Input
sequences.path = '.\data\TwoPeopleOcclusion_1\'; sequences.basename = 'Seg'; sequences.noDigits = '%05d'; sequences.format = 'jpg'; sequences.firstFrame = 1; sequences.lastFrame = 499;
Initialization.
%Read frame noFrame = sprintf(sequences.noDigits, sequences.firstFrame); imgName = sprintf('%s%s%s.%s', sequences.path, sequences.basename, noFrame, sequences.format); fr.RGB_uint = imread(imgName); %Background substraction initialization: a reference background. bs_param = [0.01 1.5*1.5 1 0.05]; %See Note 1. h = mexCvBSLib(fr.RGB_uint); mexCvBSLib(fr.RGB_uint, h, bs_param); %Set parameters.
MyClass created.
%Loop processing. for ifr = sequences.firstFrame + 1 : sequences.lastFrame
Read frame
noFrame = sprintf(sequences.noDigits, ifr);
imgName = sprintf('%s%s%s.%s', sequences.path, sequences.basename, noFrame, sequences.format);
fr.RGB_uint = imread(imgName);
Background Subtraction.
%Three different levels: background, shadows, foreground. %The first frames are used to model the background. It should not %contain moving objects. imMask = mexCvBSLib(fr.RGB_uint, h);
Noise supression.
Median filtering.
imMask_2 = medfilt2(imMask,[11 11]);
%Moving regions. imMask_mov = (imMask_2 == 255); %Moving regions and shadows. imMask_bot = (imMask_2 == 125 | imMask_2 == 255);
Object properties: centroids and region coordinates.
Centroids represent the object locations.
mov_st = regionprops(imMask_mov,'Centroid','PixelIdxList','Area');
Filtering objects by size.
mov_st([mov_st.Area] < 30) = [];
cen_mov = cat(1, mov_st.Centroid);
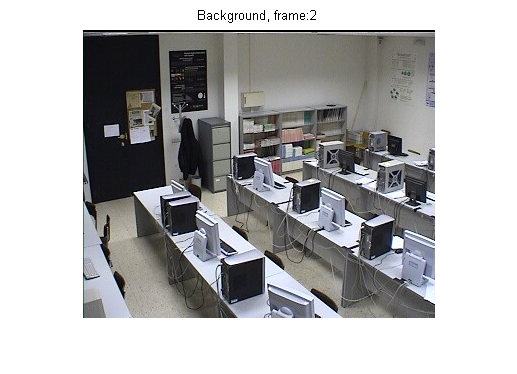
Results: Show an image without moving objects.
if(0 || ifr == 2) figure(1); imshow(fr.RGB_uint); title(['Background, frame:', sprintf('%d',ifr)]); snapnow; end
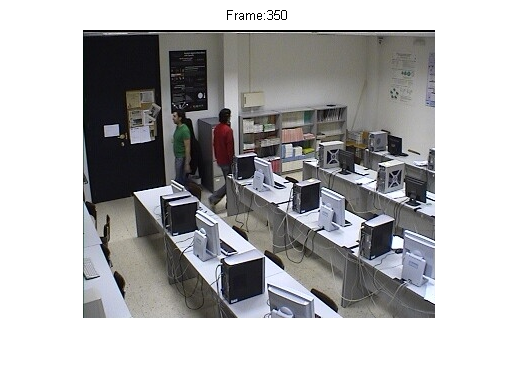
Results: Show an image with moving objects.
if(0 || ifr == 350) figure(1); imshow(fr.RGB_uint); title(['Frame:', sprintf('%d',ifr)]); snapnow; end
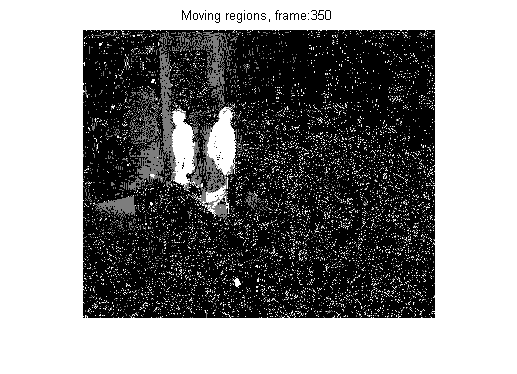
Results: Show moving regions.
if(0 || ifr == 350) figure(1); imshow(imMask); title(['Moving regions, frame:', sprintf('%d',ifr)]); snapnow; end
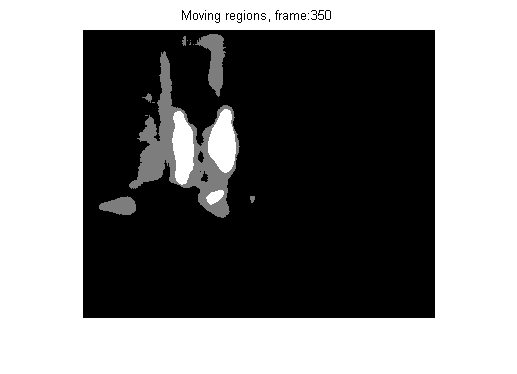
Results: Show moving regions after noise filtering.
if(0 || ifr == 350) figure(1); imshow(imMask_2); title(['Moving regions, frame:', sprintf('%d',ifr)]); snapnow; end
Results: plot object centroids.
if(0 || ifr == 350) figure(1); imshow(imMask_2); hold on; if (~isempty(cen_mov)) plot(cen_mov(:,1), cen_mov(:,2), 'r+'); end hold off; axis ij; xlim([1, size(imMask_2,2)]); ylim([1, size(imMask_2,1)]); title(['Centroids of moving regions, frame:', sprintf('%d',ifr)]); snapnow; end
drawnow;
end
Ending
mexCvBSLib(h); %Release memory
MyClass destroyed.
Note 1
bs_param = [fAlphaT, fTb, bShadowDetection, fTau]. * fAlphaT: speed of update. If the time interval you want to average over is T set alpha=1/T. * fTb: threshold on the squared Mahalan. dist. To decide if it is well described by the background model or not. Related to Cthr from the paper. This does not influence the update of the background. A typical value could be 4 sigma => Tb=4*4=16; * bShadowDetection: do shadow detection if ==1. * fTau: shadow threshold. The shadow is detected if the pixel is darker version of the background. Tau is a threshold on how much darker the shadow can be. Tau= 0.5 means that if pixel is more than 2 times darker then it is not shadow.
More information in : * "Improved adaptive Gausian mixture model for background subtraction", 2004. * "Efficient Adaptive Density Estimapion per Image Pixel for the Task of Background Subtraction", 2006.